DESENVOLVIMENTO DE CONTROLADOR DE VEÍCULO AUTÔNOMO PARA RECOLHER BOLAS DE TÊNIS
Orhan Bittencourt Fernandes da silva | orhanorhanbittencourt@gmail.com
Cláudio Luís d’Elia Machado | claudiomachado@pelotas.ifsul.edu.br [ORIENTADOR]
Fabiano Sandrini Moraes | fabianomoraes@pelotas.ifsul.edu.br
Campus: Pelotas
Nível: Ensino Superior
Área: Engenharias
Resumo
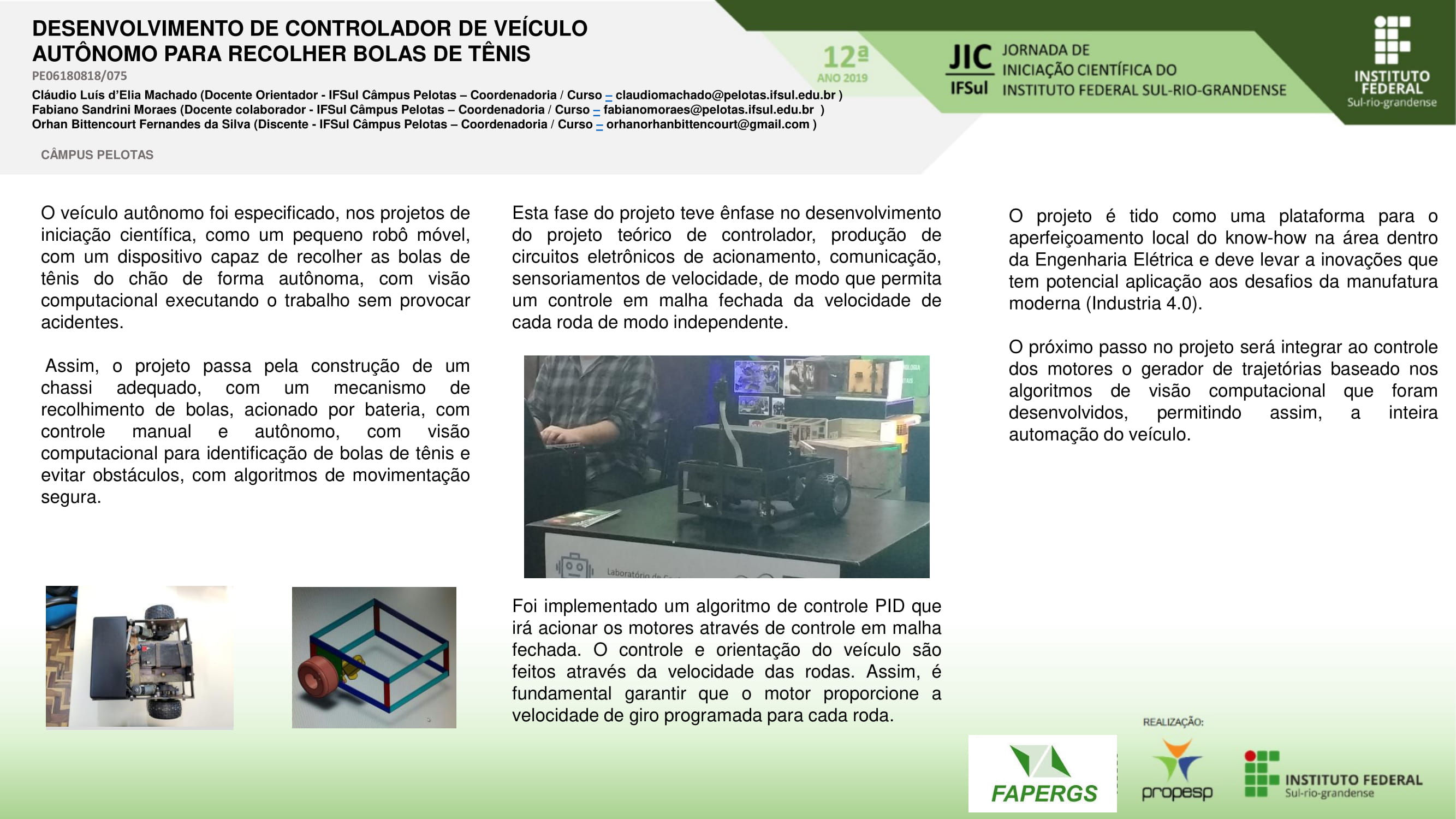
O objetivo deste trabalho é o projeto e implementação experimental de controladores em um protótipo de um veículo autônomo para recolhimento de bolas de tênis. Este projeto desenvolve um protótipo de um veículo de baixo custo com arquitetura de um robô móvel com tração diferencial.Esses controladores utilizam como sistema de potência, para acionamento dos motores, 2 módulos H-Gate Bridge Driver MC33886VW. Nas rodas foram instalados sistemas de medição de velocidade independentes. O sistema de medição utiliza um encoder com disco de 26mm de diâmetro e 20 furos e um sensor IR. O objetivo da utilização do encoder é o fechamento da malha de controle de posição e de velocidade do veículo, permitindo realizar o controle do movimento do veículo. O módulo de encoder é composto por um circuito de comparação de sinais e outros dois circuitos independentes onde ficam o Emissor e o Receptor IR. A velocidade da roda é obtida medindo-se o tempo entre os pulsos gerados pela interrupção da barreira de luz do sensor IR causada pelos furos do disco do encoder. Como circuito de controle, foi utilizada uma placa Arduino. Assim, os sinais de medição de encoder são levados para a placa Arduíno que será responsável por gerar sinais de acionamento dos motores através de um algoritmo adequado. Foi implementado um algoritmo de controle PID que irá acionar os motores através de controle em malha fechada. O controle e orientação do veículo são feitos através da velocidade das rodas. Assim, é fundamental garantir que o motor proporcione a velocidade de giro programada para cada roda.
Palavras-chave
Automação; Controle de velocidade; Driver de potência