Smartleg Ômega: 4° protótipo de prótese transfemoral inteligente
Daniel Lucas Chan | danielchanrosk@gmail.com
Diego Afonso da Silva Lima | diegolima@charqueadas.ifsul.edu.br [ORIENTADOR]
Campus: Charqueadas
Nível: Ensino Médio
Área: Engenharias
Resumo
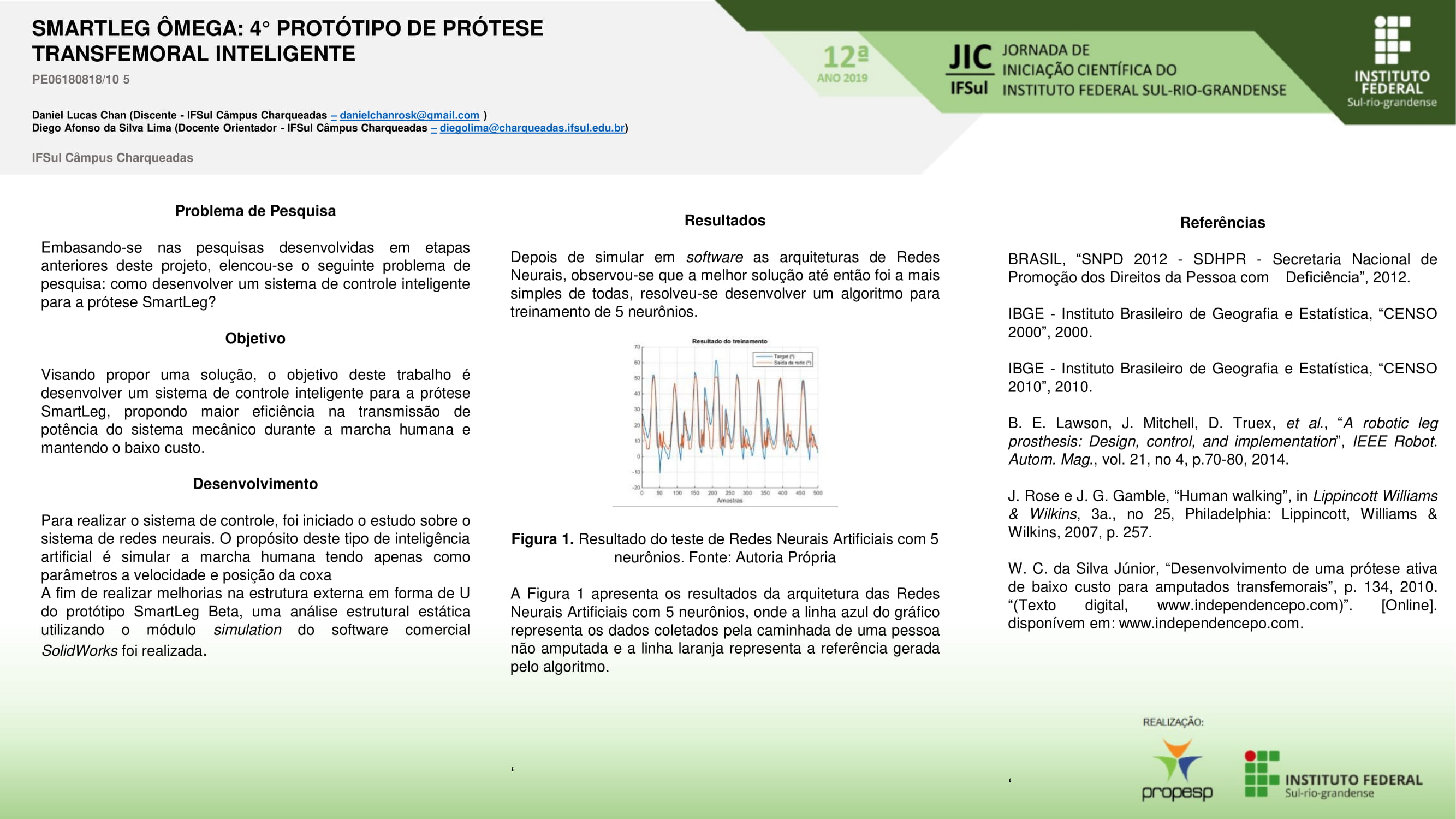
As próteses transfemorais ativas se mostram eficientes em reproduzir o ciclo de marcha humano, porém, os poucos dispositivos disponíveis no mercado são feitos no exterior e têm um alto custo. Além disso, muitos desses oferecem adaptação limitada e manutenção onerosa, tornando o processo de adaptação do usuário muito longo e cansativo. Com o intuito de solucionar esses problemas foi desenvolvida a prótese SmartLeg Beta, e a partir de seus resultados, avaliou-se a necessidade de otimização do protótipo e implementação de técnicas de controle aprimoradas que sejam capazes de reproduzir a marcha humana com maior eficiência e adaptar-se ao biotipo de cada usuário. O objetivo deste trabalho é avaliar o projeto mecânico do protótipo anterior (SmartLeg Beta), com vistas a fazer ajustes em sua construção e tornar possível a execução de testes em laboratório para este protótipo. Além disso, pretende-se desenvolver um sistema de controle inteligente para a prótese SmartLeg, propondo maior eficiência na transmissão de potência do sistema mecânico durante a marcha humana e com baixo custo. Durante esta etapa do projeto, foi implementada uma simulação via rede neural artificial, e observou-se que resultado é semelhante ao melhor resultado obtido anteriormente, por este motivo esta rede neural foi escolhida como a melhor até então e será utilizada para a conclusão do trabalho. Uma simulação estrutural estática da prótese foi realizada a fim de melhorar o dimensional do protótipo anterior (SmartLeg Beta). Os resultados apontam para mudanças nas dimensões do protótipo anterior, para aperfeiçoamento desta. Testes em laboratório serão conduzidos com esta prótese, além do desenvolvimento de um novo protótipo denominado SmartLeg Ômega.
Palavras-chave
Próteses transfemorais ativas; Biomecânica da marcha;Sistemas inteligentes